
Last week I traded in my trusty 2012 Nissan Leaf SL for a shiny, new blue 2013 Nissan Leaf S. My first Leaf was a great car. I never had any problems, and it was incredibly fun to drive. I traded it in primarily because I wanted to significantly reduce my monthly payments. (And I really wanted it to be blue. I didn't have a choice with the first one because I had to take what I could get under special circumstances.)
I knew I was going to get another Leaf. I can't imagine going back to an ICE car after having experienced electric driving. (I just discovered that that makes me a statistic. Apparently I'm in agreement with 97% of EV owners in getting another EV after the first one.) There are other options out there now, but for the price and availability, a Nissan Leaf S simply cannot be beat.
There are two Nissan dealerships in Madison. One dealership had eight 2013 Leaf S cars on their lot (three in blue) and the other had four of them. With the 2014s finally arriving, this created more than a little competition to get those cars sold. After all of the tax credits and incentives were accounted for, I ended up with a brand new Leaf for $17,200. That's insane.
I decided to lease this one because the technology is moving so fast that I was chasing the value of my car down with the loan payments. How fast? Now it appears that Nissan may have a Leaf with 135 mile range as soon as next year. At the minimum, there is going to be a big push for more range as Tesla nears release of its Model E in 2017. The current range of the Leaf is enough for my needs, but prices will continue to drop since the performance of each model year is so much better than the last. With a lease I also don't have to worry about claiming the full federal tax credit because it's taken off the price of the car up front.
Do You Notice Anything Different?
That's the first question I get when people learn that I got a new Leaf. It used to be how far can you drive, or how long does it take to charge? Now that's all old news. People want to know what's new. The driving experience of the 2013 is indistinguishable from the 2012 to me. It's still an incredibly quiet ride with silky smooth acceleration that's immediately available at a push of the "Go" pedal. There is no hesitation. The torque provided by the traction motor was reduced from 207 ft-lbs to 187 ft-lbs, but I cannot tell the difference. It's still satisfyingly quick off of a dead stop, and it can accelerate up hills and onto the freeway effortlessly.
There are a fair number of other changes, especially because I went from the high-end SL model to the new low-end S model. I'll start with a list of things not in the S ordered by how much I'm going to miss them:
Cruise Control: Yes, the Leaf S does not come with cruise control. It's a bummer, but since I very rarely leave the city of Madison, it's not that bad. I used to use it on the beltline, but I've pretty much adjusted to life without it. If I get an EV with enough range to go to Milwaukee in the future, cruise control will definitely be a necessity.
Homelink rearview mirror: I didn't care much about the auto-dimming feature, but it was nice to have my garage door programmed into a button on the rearview mirror. Now I need a clicker, and the sun visors on the Leaf are really thick. They're so thick that I can't clip the clicker to them, so I resorted to dropping the clicker in the little pocket where the electric parking brake lever used to be. That works out okay.
Electronic parking brake: Speaking of which, I actually miss the electronic parking brake. It was kind of cool, and people would always wonder what that weird humming noise was when I started my car. It had nothing to do with the car being electric. It was actually the brake releasing. Oh well, a standard foot pedal parking brake replaces it.
Touch display with navigation: The big touch display was replaced with a small color display that's pretty much exclusively used for audio features. It feels a lot less high-tech, but I really didn't use it much. It was pretty much always on the status screen to show which song was playing off of my iPod and what my (grossly overestimated) average miles/kWh were. I only used the navigation feature a handful of times, again because I rarely leave the city with it, and Google Maps is totally adequate anyway.
Automatic LED headlights: These were nice, but headlights are headlights. I just need to remember to turn them on now.
Alloy wheels: They looked nice, but honestly, I can't see them from inside the car, and their effect on the car's efficiency was probably marginal at best.
Rearview camera: I could not break the habit of turning around and looking back when driving in reverse, so I never remembered the rearview camera display until I had turned forward again to put the car in drive. I know, weird, right? Looking backward when going backward, who would have thought?
Quick charge port: I'm sure the QC port would be really useful if you needed to charge your battery fast, didn't mind stressing the battery, and could find a DC charging station. I don't meet any of those requirements, so I never used it nor felt the need to.
Car Wings: I confess, I played around with Car Wings a couple of times. I found it completely useless. I won't miss it or that stupid dialog box that I had to respond to every time I started the car.
Solar panel: I still don't understand why Nissan bothers with this solar panel. It's too small to provide much of any benefit, and it only charges the accessory battery anyway. It's still available on new SL models if you want one. I won't be interested until it's a serious panel that covers the whole roof and charges the main battery.
Aside from cruise control and possibly the Homelink rearview mirror, I could easily do without most of these features, which is why I went with the S model for this car. One feature that was introduced on the 2013 Leaf was a B-mode that enabled stronger regenerative braking. It sounds interesting, but the S model doesn't have it. That's alright by me since the regenerative braking on the 2012 Leaf was already sufficient, and there are always losses associated with it so to get the highest possible efficiency you want to avoid any type of braking when you can, even the regenerative kind. Other new features in all models of the 2013 Leaf include:
Percent battery charge meter: This is hands-down the best new feature in this car. On the dashboard display you can now select an option to display the charge percentage left on the battery, the same type of readout that laptops have had for, well, forever. It took me all of five minutes to get a feel for how the percent reading goes down during driving and started completely ignoring the GOM (Guess-O-Meter, or estimated miles left). The percent charge meter will also be a significantly better meter to use for my data collection.
15% more efficient: Nissan improved the Leaf's driving efficiency by 15%, and my first impression is that this is real, significant, and noticeable. I used to be able to do my 23-mile round-trip commute twice on an 80% charge in the summer, but with the 2013 Leaf, I can do it three times. I'll probably be able to easily do it twice in the winter now, whereas it used to be a nail-biting experience the couple times I needed to do it in the 2012 Leaf.
Drives in ECO mode by default: The normal drive mode and ECO mode are switched so that the first mode is now ECO mode. That suits me just fine because it's the mode I normally drive in. Every once in a while I like the extra pep of drive mode, but most of the time it's too touchy, and I'd rather stick with the more efficient ECO mode. All of the fast acceleration is still there anyway. You just have to push down farther on the accelerator to get it.
Larger trunk: Nissan moved the charger to the front of the car, freeing up substantial space in the trunk. Sweet.
Cabin heater is a heat pump: The new cabin heater is about twice as efficient as the 2012 standard cabin heater, so I may actually use it this winter. We'll see. The heated steering wheel and seats were enough last winter. (Update: Unfortunately, the S does not have the heat pump. Guess I won't be using it. Oh well.)
Locking charge port with light: Now if I ever use a public charging station, I can lock the plug to my charging port so no one can unplug it. It's definitely a good feature to have. I wouldn't want someone disconnecting me prematurely, and since I'm getting a Chargepoint card, I may actually have a use for it. The little light under the charge port door is a nice addition as well.
Overall, I'm very happy with the new features on the 2013 Leaf. It's definitely an upgrade from the 2012 model, and I hope that Nissan keeps refining the Leaf in the future. Even though I went from the high-end model to the low-end model, I'm extremely pleased with it. I got rid of a lot of features I didn't use, and the car feels basically the same as the old one. If anything, I'd say the seats are a little more comfortable because they're a bit cushier, and the braking is a bit smoother. The 2012 Leaf had a tendency to stick a little right before coming to a complete stop and when inching forward. Nothing major and you got used to it, but the smoother stopping is nice.
Wrapping Up The Data On The Old Leaf
I've taken all of this data on my 2012 Leaf, so I'll give a quick final rundown of the last set of data I have. Unfortunately, it's taken a while for the weather to warm up this spring, so the temperatures didn't get back up into the 80s and 90s. Because the temperature range of the data from February until now is restricted, linear regressions won't work quite as well for estimating the battery's health.
I've kept the methodology the same since the last time I reported my Leaf's mileage statistics. I record the temperature, odometer, and miles left on the GOM after every trip, as well as the starting miles on the GOM after I charge and the kWh used from the wall outlet with a P4460 Kill A Watt electricity usage meter. I use the temperatures and odometer miles to calculate an average temperature per mile driven for each charging cycle.
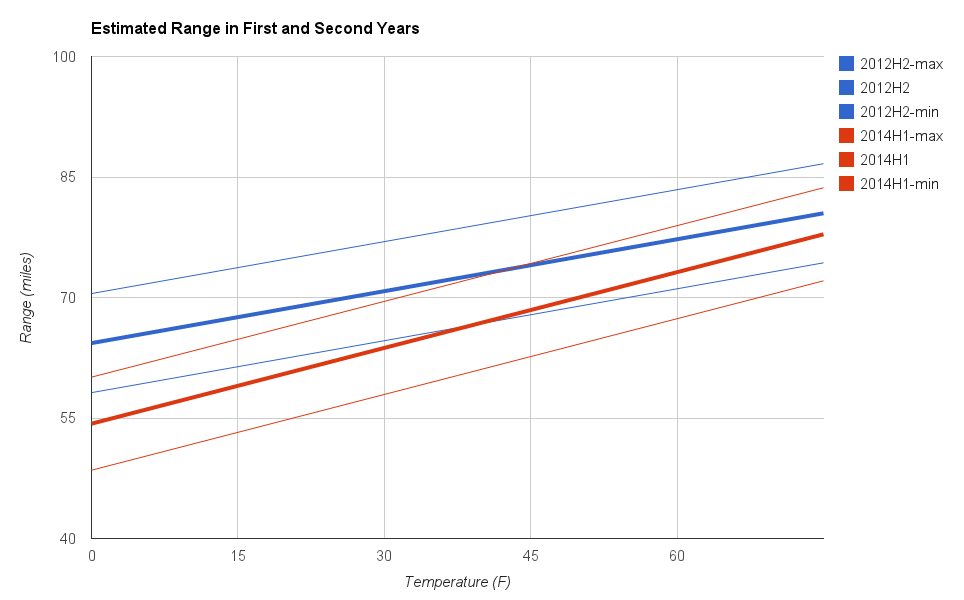
What follows is the same analysis that I did at the two-year mark, but I'll skip the basic post-charge GOM regressions because without the data at higher temperatures for the last time period, the regressions are pretty useless. The other main way to look at the data is to estimate what the post-charge GOM miles should be when the Leaf is fully charged, given the average temperature of the trips driven on that charge. Here's a plot of two years worth of charging and driving with the new data in green (click for a larger view):

As you can see, it's hard to tell if the Leaf has lost any more range in the last couple months. Normally, a linear regression of this data could tease that information out, but without the data at the higher temperatures, it probably won't be very reliable. Let's do it anyway.
The other point of interest is the validity of the Leaf's energy efficiency meter. Now that I have a few months of data that include a measure of the electricity used to charge the car from the wall outlet, we can take a look at how the mileage efficiency compares with the Leaf's meter as the weather warms up. I've broken the measurements down by month to smooth out day-to-day variations:
Leaf miles/kWh
|
Calculated miles/kWh
|
Charging Efficiency
| |
February
|
4.0
|
2.7
|
68%
|
March
|
4.3
|
3.0
|
70%
|
April
|
4.7
|
3.4
|
72%
|
May
|
4.8
|
3.5
|
73%
|
Clearly, my calculated values are increasing relatively faster than the Leaf's reported values, resulting in closer agreement as the ambient temperature increases. I'm not sure that it's enough to make me believe that the discrepancy is entirely due to inefficiencies in the 110V trickle charger, but at least it's moving in the right direction.
The Leaf's mileage efficiency should peak at 5.1 miles/kWh in the summer, and the calculated efficiency from the wall will probably be 3.8 or 3.9 miles/kWh, giving a charging efficiency of about 75%. That still seems too low to me, as I would expect something closer to 85%. I'll have to see what happens with the new Leaf. It won't be an apples-to-apples comparison, but it will still be interesting to see what happens.
Wrapping Up
I'm very excited to have the new Leaf. It's what I really wanted the first time around, and after a two and a half year wait, I finally got it. The ride is as comfortable and fun as it was in the 2012 Leaf, and the new features, including the improved efficiency and larger trunk, are a welcome addition. I am especially happy to have a real battery charge meter. It should prove very useful for future data analysis, and it significantly improves my feel for the range of the car. It's amazing that something so simple could be the best new feature of the 2013 Leaf.
Oh, if you're in the market for a well-maintained, fully-loaded used Leaf, and you're in the Madison area, you could head over to Kayser Nissan. There's a silver 2012 Leaf with a very healthy battery at a great price sitting on the lot.







{kind=link}